Arduino Servo with Potentiometer: A Beginner's Guide to Controlling a Servo Motor Using an Arduino Uno with control from a Potentiometer
Introduction
Arduino Servo with Potentiometer: Welcome to this beginners tutorial
on using an Arduino Uno to control a servo motor with a potentiometer.
Servos and potentiometers are very common components for introductory
robotics and electronics projects.
 Being able to accurately position a
servo to match the rotation of a knob or dial is useful for building
simple robotic arms, volume controls, and other interactive
prototypes.
Being able to accurately position a
servo to match the rotation of a knob or dial is useful for building
simple robotic arms, volume controls, and other interactive
prototypes.
This tutorial will guide you step-by-step through wiring up an Arduino,
connecting a standard servo and potentiometer, uploading some simple
Arduino code, and testing it out. By the end, you will have a working
demo that allows real-time control over a servo's angular position just
by twisting the potentiometer knob.


The components and code used are very beginner friendly. No complex
programming or electronics skills are required. With just the basic
parts listed and following the instructions, anyone can have success
with this project. I hope you find this tutorial helpful as a starting
point for your robotics and programming adventures.
Overview: In this tutorial, we will learn how to control the
movement of a small servo motor by attaching it to an Arduino Uno board
and reading the position of a potentiometer or variable resistor. This
project allows you to control the angle of a servo by rotating the
potentiometer knob.
There is one very important point you should know and that is:
No Two Servos are the same!
They are not designed as precision devices. It is likely that when
you command the servo to go to the zero or 180 Degree positions, it will
be inaccurate.
This tutorial will also show you how to correct that and calibrate your servo motor.
Required Components
- Arduino Uno board
- Servo motor (type SG90)
- Potentiometer (10k ohm recommended)
- 100uF Electrolytic capacitor
- Jumper wires
- Breadboard
Arduino servo with potentiometer: Circuit Diagram
The wiring is very simple. Connect one leg of the Arduino servo pot to
the 5V pin on the Arduino. Connect the middle leg to analog pin A1.
Connect the other leg to ground. Connect the power/positive leg of the
servo to the 5V pin. Connect the ground leg to ground. Connect the
signal leg to digital pin 11.
The electrolytic capacitor will smooth out the power supplied to the
servo motor. When the servo moves high current is drawn which the
Arduino may not be able to fully supply and this results in jerky motion
of the servo.
Adding the capacitor solves this - you probably need 100uF per servo. In addition for lots more servos you will need a separate higher current output 5V supply - just for the servos.

Diagram using fritzing

Diagram using fritzing
Arduino IDE and Libraries
The code for the Arduino servo library is already integrated into the
Arduino IDE environment, so you don't need to install the servo
library.
All you do is include the library using the include operation at the top of your program
#include <Servo.h>
...and then use the Servo functions as needed (see code below).
Arduino servo with potentiometer: Example Sketch Ex1
The following Arduino servo potentiometer code gives you simple code
to implement control of a servo motor using a potentiometer.
You can copy and paste the code below into the Arduino IDE (in a new
sketch) replacing everything that is in the new sketch window (See "Uploading the code" below).
sketch: arduino_servo_with_potentiometer_ex1.ino
This
Arduino Servo with Potentiometer code reads the value of the potentiometer on analog pin A1, maps it to a
value between 0-180 degrees for the servo, and writes that value to
control the servo position.
Test It Out
Upload the Arduino Servo with Potentiometer code to your Arduino. Rotate the potentiometer knob and watch the servo move to match the position. You now have a functioning motor position controller using just a potentiometer for input!
What you may notice, is that the servo positions do not do a true 180
Degrees and that is why you need the following program to figure out the
calibration values for the servo.
Arduino servo with potentiometer: Example Sketch Ex2
This program uses the serial port to allow you to enter pulse width
time period (PWM signal) to command the servo to move. This time
however, the angle is set by the length of output pulse signal sent to
the servo
in microseconds instead of an angle in degrees.
This is done because the servo library allows you to enter the
minimum and maximum values of the control signal and they are not as you
would expect, between 1000us and 2000us.
myServo.attach(11, MIN_PULSE, MAX_PULSE);
These MIN_PULSE and MAX_PULSE values define the servo positions
corresponding to 0 Degrees and 180 Degrees respectively i.e. these allow
you to calibrate the servo to get the 0 and 180 Degree positions
accurate.
The library actually allows you to specify the output between the following
values:
544us and 2400us.
The following program will allow you to observe the servo and figure
out these values i.e. you will calibrate the servo. Once you have done
this use these values for that specific servo (each servo may be
different and require different calibration values).
sketch: arduino_servo_with_potentiometer_ex2.ino
Using the calibration code
The code is driven using the serial port as a serial commander. The commands are as follows:
0 - Set pos 0
1 - Set pos 180
t - toggle between 0 and 180
h<n> - set high us value (180 degree position)
l<n> - set low us value (0 degree position)
r - set high and low to 2000,1000us
v - print h & l us
Intially the max. and min. pulse outputs are set to 1000 and 2000.
Press the toggle key to move between 0 and 180 Degrees. You will
probably find that it does not move far enough. So enter l<num>
and h<num> for the new pulse settings. For example:
l800
h2200
Now enter 't' to toggle the new servo positions. Continue until you are happy with the results. Type in 'v' the see the values you entered. You can use these to calibrate the servo - place these numbers into you servo code for initialisation.
Uploading the Code
There are a few steps to uploading the code using the Arduino IDE:
- Connect the Arduino Uno to the PC with a USB cable.
- Select the Arduino Uno hardware.
- Open a new sketch.
- Paste the code above into the new page (overwrite everything).
- Press the upload button (right arrow at top).
You can find a more detailed tutorial on the Arduino IDE page.
Conclusions
In this tutorial, you learned the basics of controlling a servo motor
with an Arduino. By connecting a servo, potentiometer and the Arduino
board, you created a simple circuit to link the rotation of a knob to
movement of the motor. Uploading some sample code allowed you to test
how adjusting the potentiometer changed the angular position of the
servo in real-time.
You also explored calibrating servos for precise rotation. By sending
pulse-width signals directly, you learned how to set minimum and maximum
pulse widths to ensure the servo could accurately reach 0 and 180
degree positions.
Understanding servo calibration is important for
applications that require position control. The skills you gained in
controlling a servo with an analog input provide a foundation for more
complex robotics and automation projects using an Arduino board.
I hope this basic tutorial on using "An Arduino, a potentiometer and a servo motor" helps you get started controlling servos with an Arduino. Let me know if you have any other questions!
Written by John Main who has a degree in Electronic Engineering.
Site Map | Terms of Use
Search:
Recent Articles
-
Arduino Nano PWM pins
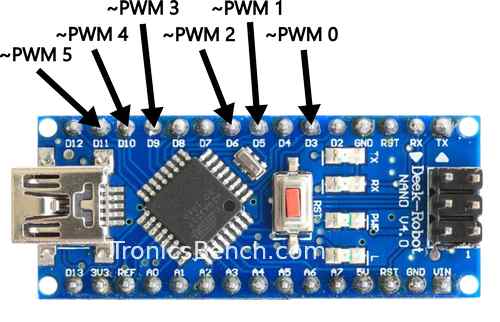 Arduino Nano PWM pins: Eight things you must know about PWM pins including how they affect timers.
Arduino Nano PWM pins: Eight things you must know about PWM pins including how they affect timers. -
Learn How to Use the DHT22 with an Arduino; Full code examples included
 How to get accurate DHT22 digital humidity sensor readings with an Arduino. Did you know it also measures temperature as Well? Find out why, in this page...
How to get accurate DHT22 digital humidity sensor readings with an Arduino. Did you know it also measures temperature as Well? Find out why, in this page... -
How to Use a PIR Sensor for Motion sensing using Arduino
 A PIR sensor lets your Arduino sense movement without contact. This tutorial covers PIR sensor basics, connecting one to an Arduino board and coding a motion detector.
A PIR sensor lets your Arduino sense movement without contact. This tutorial covers PIR sensor basics, connecting one to an Arduino board and coding a motion detector. -
Arduino Hall Effect Sensor Tutorial: Detect Magnets Easily
 Arduino Hall Effect Sensor: Add magnetic sensing superpowers to your Arduino projects with an easy-to-use hall effect sensor. With full code and layout...
Arduino Hall Effect Sensor: Add magnetic sensing superpowers to your Arduino projects with an easy-to-use hall effect sensor. With full code and layout... -
INA219: Simple Arduino current measurement up to 3.2A
 INA219: How your Arduino can measure 3.2A at 100uA resolution, measuring the voltage and power consumption at the same time, using an I2C chip.
INA219: How your Arduino can measure 3.2A at 100uA resolution, measuring the voltage and power consumption at the same time, using an I2C chip. -
TP4056: Your Essential guide to the LiPo Battery Charger IC
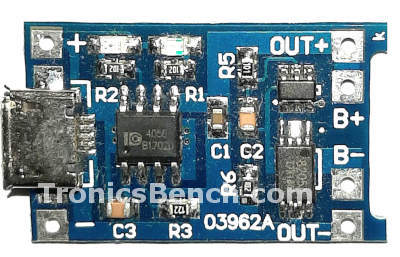 Learn how to use the TP4056 properly. There's a right way, and a wrong way for safe charging of Lithium Ion batteries with this chip.
Learn how to use the TP4056 properly. There's a right way, and a wrong way for safe charging of Lithium Ion batteries with this chip.
you so so so much
for all the information
you have provided in
your site it's
SUPERB and FANTASTIC."
- Ranish Pottath
the best and my favorite.
I find here many useful
projects and tips."
- Milan
bursach<at>gmail.com<
very, very easy and nice
to navigate!"
- Matt
matt_tr<at>
wolf359.cjb.net
"I am a newbie to PIC
and I wanted to say
how great your
site has been for me."
- Dave
de_scott<at>bellsouth.net
and perfect work.
congratulations."
- Suresh
integratredinfosys<at>
yahoo.com
words to define
yourweb site.
Very useful, uncovered,
honest and clear.
Thanks so much for
your time and works.
Regards."
- Anon
Comments
Have your say about what you just read! Leave me a comment in the box below.
Don’t see the comments box? Log in to your Facebook account, give Facebook consent, then return to this page and refresh it.