PIC PWM : Pulse Width Modulation
PIC PWM for the PIC Microcontroller. This page shows you how to setup registers in PIC microcotnrollers to control the PWM module.
Pulse width modulation or PWM is simply the creation of a digital signal that is turned on and off at a repeated rate (specific period) and with a varying mark to space ratio. The most well known use for PWM is to control motors (usually with an H-Bridge driving circuit) but you can also use them to create an analogue signal or control the brightness of LEDs or lamps.
In effect the driven element acts a smoothing circuit evening out the pulse information so that what you are really doing is changing the average power delivered to a load. In the case of a motor the inductance of the motor smooths out the digital signal; for a lamp the same is true. For an analogue output you will need a smoothing circuit (RC - resistor capacitor - circuit with center frequency well below the frequency of the PWM signal). For an LED there's no smoothing but you need the frequency to be above 50Hz so your eye can not detect flicker.
For an RC smoothing circuit attached to a PWM output you can create an analogue output signal. if the center frequency of the RC pair is well below the frequency of the PWM signal than you have a useful analogue output.
This is interesting because usually you would need a DAC to generate an analogue output and you can even use a PWM signal to re-create an audio output such as reading a WAV file from an SD card. This is super convenient for simple audio output. In fact you can also get away with so called class D amplifier which relies on the smoothing aspect of the inductance in the loudspeaker to re-create audio using only one transistor (or FET)!
The advantages of a DAC are that it will provide higher quality output with no noise component so you would want to use a DAC in a high quality instrument or audio system.
As well as saving the costs of extra chips and interfaces the Pulse Width
Modulation signal will not drift over time since it is generated from the time
base of the processor i.e. a quartz crystal. Using analogue circuits to
generate accurate signals that don't drift is a difficult task so PWM is very
effective and cheap.
It works by changing the average voltage level and this is done by generating a
constant frequency signal but one where the pulse width is changed (or
modulated).
For a moment if you think of the digital signal when it is at its extremes i.e.
normal - it generates the maximum of 5V when the output is high and the minimum
of 0V when the output is low. If you want to generate a 2.5V signal then you
need to make the signal on for half of the time and off for the rest and then
take the average.
PIC PWM digital output and average output

In the diagram the digital signal (solid line) is at a constant frequency while
the pulse width is changed (modulated). The dotted line represents the average
signal (if the digital signal is converted to an average). The duty cycle
represents the amount of time that the signal is high compared to the amount of
time that the signal is low.
PIC PWM Duty Cycle
So the top signal is high for 10% of the period so the average is low, the
middle signal is high for 50% of the period so the average is half and the
bottom signal is high for 90% of the period so the average is high. For fully
off you use 0% and fully on you use 100%.
So the duty cycle is independent of the frequency of the PWM signal and you'll
always see the same type of waveform for a specific duty cycle.
PWM Frequency
The frequency of the PWM signal is important depending on the device you are
driving. If the aim is to create a dc signal then you would want the frequency
high (kHz) so a low pass filter could remove the frequency component. How high
depends on how much frequency component is allowed at output and depends on how
it is used i.e. what error can be tolerated.
Averaging the PIC PWM output
To convert the PWM signal to a usable analogue signal you need to average it
and you can do this by using a resistor capacitor filter (low pass). The higher
the PWM frequency the less that frequency will come through the filter so you
can design out the PWM frequency from the analogue output.
Note: In some cases a filter is not needed as
the filtering is done by the device you are controlling e.g. a motor (is
inductive anyway). Or in the case of an RGB ledyour eye
averages out the signal (persistence of vision)!
Noise immunity of the PIC PWM signal
Since the PWM signal is fully digital the only way noise can affect it is if
the noise is strong enough to change a digital 1 to a digital 0 and vice versa.
This immunity is much higher than a purely analogue signal that will be
affected by any noise.
For this reason changing an analogue signal into a digital one can improve
either the signal transmission distance or its immunity to spurious noise.
For example you could encode an audio signal into PWM, send it over longer
cables than a pure analogue signal could travel, and then remove the PWM
frequency at the receiver.
Projects using PWM techniques :
Note: that the RGB led link above uses a software PWM method as it needed three PWM outputs and the 16F877 only has 2.
Controlling the PIC PWM output
The PIC microcontrollers are very easy to use with PWM as they have built in
PWM generators - all you do is set up the relevant control registers
// Timer 2 PIC PWM
PR2=199; // 4 MHz clock -> 5kHz PWM
frequency
T2CON = (1<<TMR2ON);
// Initialize Control PIC PWM
CCPR1L = 30; // Initial Duty
CCP1CON = 0x0f; // PWM mode set and 5,4
duty = 0
...and then control the duty cycle:
CCPR1L = j;
Note that the above control only controls the upper 8 bits of the 10 bit
PWM module (the other two bits are in a CCP1CON).
Note the above code is part of the C
programming course.
P.S. One PIC PWM 'gotcha' is that the duty cycle for the PIC microcontroller is
not the generic duty cycle measured as a percentage rather it is the number of
basic oscillator cycles for the output to remain high. So its related only to
the master clock not to the period of the PWM signal!
Site Map | Terms of Use
Search:
Recent Articles
-
Arduino Nano PWM pins
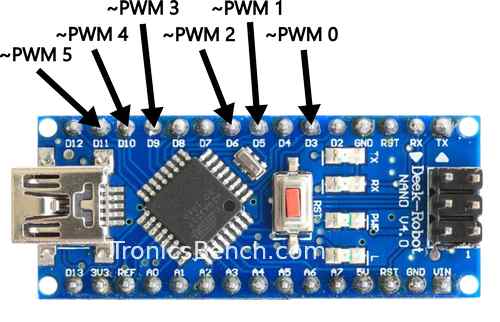 Arduino Nano PWM pins: Eight things you must know about PWM pins including how they affect timers.
Arduino Nano PWM pins: Eight things you must know about PWM pins including how they affect timers. -
Learn How to Use the DHT22 with an Arduino; Full code examples included
 How to get accurate DHT22 digital humidity sensor readings with an Arduino. Did you know it also measures temperature as Well? Find out why, in this page...
How to get accurate DHT22 digital humidity sensor readings with an Arduino. Did you know it also measures temperature as Well? Find out why, in this page... -
How to Use a PIR Sensor for Motion sensing using Arduino
 A PIR sensor lets your Arduino sense movement without contact. This tutorial covers PIR sensor basics, connecting one to an Arduino board and coding a motion detector.
A PIR sensor lets your Arduino sense movement without contact. This tutorial covers PIR sensor basics, connecting one to an Arduino board and coding a motion detector. -
Arduino Hall Effect Sensor Tutorial: Detect Magnets Easily
 Arduino Hall Effect Sensor: Add magnetic sensing superpowers to your Arduino projects with an easy-to-use hall effect sensor. With full code and layout...
Arduino Hall Effect Sensor: Add magnetic sensing superpowers to your Arduino projects with an easy-to-use hall effect sensor. With full code and layout... -
INA219: Simple Arduino current measurement up to 3.2A
 INA219: How your Arduino can measure 3.2A at 100uA resolution, measuring the voltage and power consumption at the same time, using an I2C chip.
INA219: How your Arduino can measure 3.2A at 100uA resolution, measuring the voltage and power consumption at the same time, using an I2C chip. -
TP4056: Your Essential guide to the LiPo Battery Charger IC
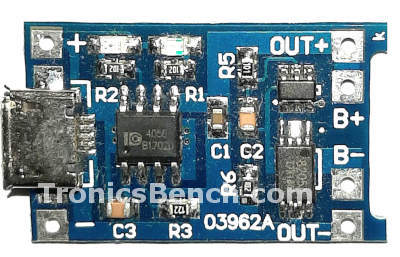 Learn how to use the TP4056 properly. There's a right way, and a wrong way for safe charging of Lithium Ion batteries with this chip.
Learn how to use the TP4056 properly. There's a right way, and a wrong way for safe charging of Lithium Ion batteries with this chip.
you so so so much
for all the information
you have provided in
your site it's
SUPERB and FANTASTIC."
- Ranish Pottath
the best and my favorite.
I find here many useful
projects and tips."
- Milan
bursach<at>gmail.com<
very, very easy and nice
to navigate!"
- Matt
matt_tr<at>
wolf359.cjb.net
"I am a newbie to PIC
and I wanted to say
how great your
site has been for me."
- Dave
de_scott<at>bellsouth.net
and perfect work.
congratulations."
- Suresh
integratredinfosys<at>
yahoo.com
words to define
yourweb site.
Very useful, uncovered,
honest and clear.
Thanks so much for
your time and works.
Regards."
- Anon
Comments
Have your say about what you just read! Leave me a comment in the box below.
Don’t see the comments box? Log in to your Facebook account, give Facebook consent, then return to this page and refresh it.